近日,公司威廉希尔WilliamHill殷瑞雪等在《Nature Communications》上发表了题为“Comprehensive modeling of corkscrew motion in micro-/nano-robots with general helical structures”的研究论文,提出一种无结构限制的通用微纳机器人(MNRs)动力学模型,有助于在临床环境中通过定制个体患者来规划MNRs的导航,也有助于了解血液在与MNRs相互作用时的行为,例如血管堵塞等,从而预防MNRs靶向治疗中引起的并发症。

微纳米机器人(Micro-/nano Robots, MNRs)在利用血管输送实现病灶微创靶向治疗方面具有令人瞩目的潜力,对改善人类健康具有开拓性的影响。然而,当前MNRs的临床应用受到诸多限制,其中最关键的限制之一为如何克服血流运动影响实现MNRs的精准控制。为解决上述问题,首先需要能够充分了解MNRs在血液中的运动行为。针对现有MNR动力学模型仅适用于标准螺旋结构MNRs的不足,本文提出一种无结构限制的通用MNR动力学模型,通过仿真和实验验证了该模型在预测多种不同结构MNRs运动规律的准确性。该模型深入阐述了MNRs的运动机理,不仅展示了在推进速度预测和精确导航方面的巨大潜力,还为MNRs的结构设计和性能优化开辟了新的途径。该模型将有助于利用模式识别技术构建磁输入和运动输出之间的通用MNRs动态关系,为精确的闭环控制系统奠定基础。此外,该模型还能够与磁场、声场、热场等多种外部驱动方法紧密结合,从而拓宽了MNRs的应用范围并提高其有效性。这项研究对MNRs在医学和生物医学工程等领域的应用做出了一定的贡献。
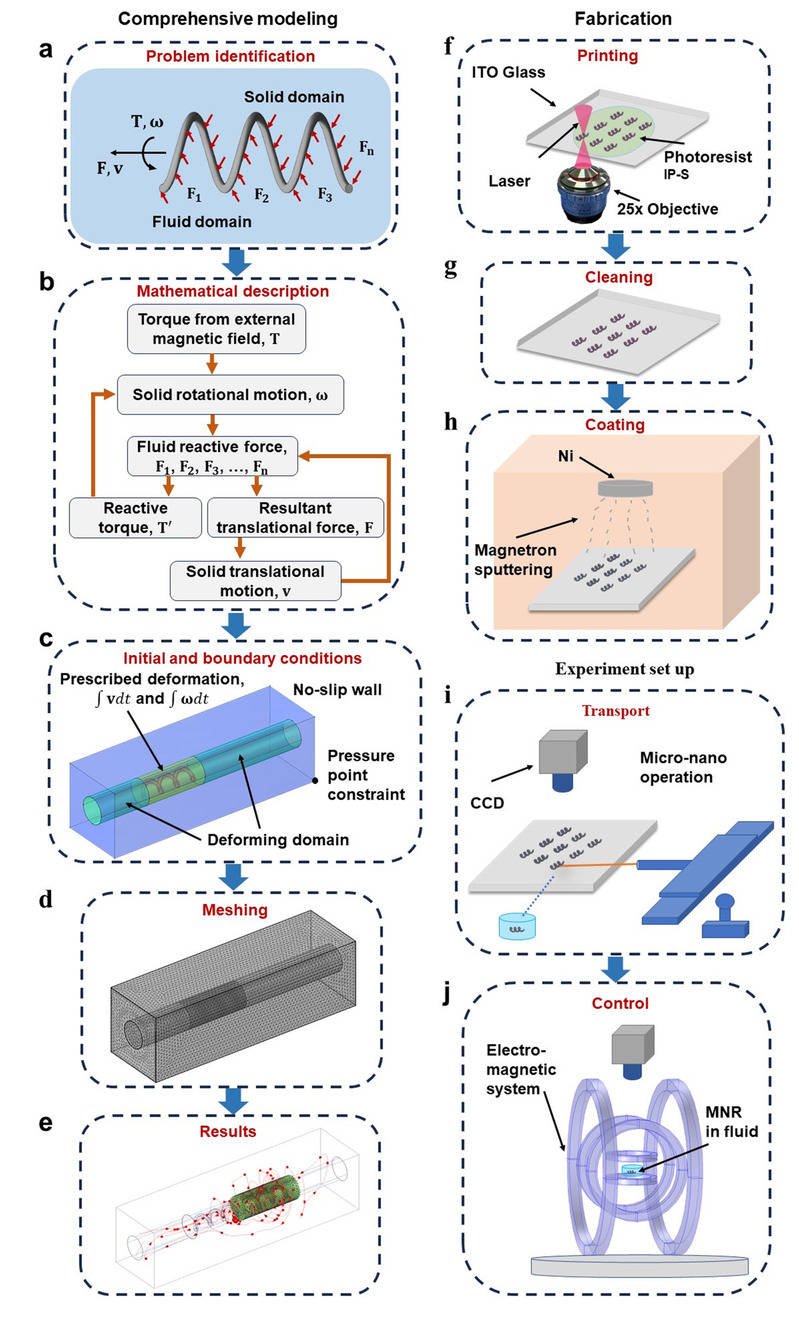
图片说明: 微纳米机器人螺旋运动数学模型建立及双光子打印制备
该研究工作由威廉希尔WilliamHill、上海大学和加拿大萨斯喀彻温大学共同完成,威廉希尔WilliamHill殷瑞雪副教授、上海大学张兵副教授、加拿大萨斯喀彻温大学丁路佳博士为共同通讯作者,研究得到了萨斯喀彻温大学Chris Zhang 教授以及明澈科技公司团队的指导与支持。
原文连接:https://doi.org/10.1038/s41467-024-51518-z